Z-COLLIDE
Z-Collide was my first
collision detection library, built on top of ICE. I did
this when discovering the world of collision detection, trying to
re-implement pretty much all the CD algorithms I could see in the
litterature - and to improve them while I was at it. Nowadays, it
is slightly obsolete.
Old demo: the cube hell !
Click here for a
screenshot.
Last version:
Z-Collide :
- supports collision detection of
multiple rigid bodies
- works on arbitrary models (convex or
not), and also handles polygon soups
- uses a four-stages collision detection
pipeline
- the first stage divides the world into
multiple independent sectors
- the second stage uses a revisited sweep-and-prune
algorithm and works with bounding volumes
- the third stage uses OBB trees
for concave objects and polygon soups, and an enhanced
GJK + separating vector algorithm for convex ones
- the last stage goes down to the
triangle level, and reports closest points
Regarding OBB trees,
Z-Collide is similar to V-Collide in spirit, but it’s
much more efficient :
- the sweep-and-prune algorithm always
runs in linear time, without relying on temporal
coherence.
- the OBBTree code has been optimized. A
big part of the original code comes from the RAPID
library.
- memory requirement is more than 3
times smaller. (see my notes somewhere on the site, and
Gottschalk's comments)
Regarding GJK and
separating vectors, Z-Collide is similar to Q-Collide, but
also shares similarities with Van Den Bergen and Cameron's GJK
implementations:
- temporal coherence is fully exploited
- the search for supporting vertices
uses hill-climbing / local search
- initial supporting vertices are
precomputed in a little table
- GJK termination condition is more
robust than the original one
- GJK and separating vectors are
combined in a single algorithm
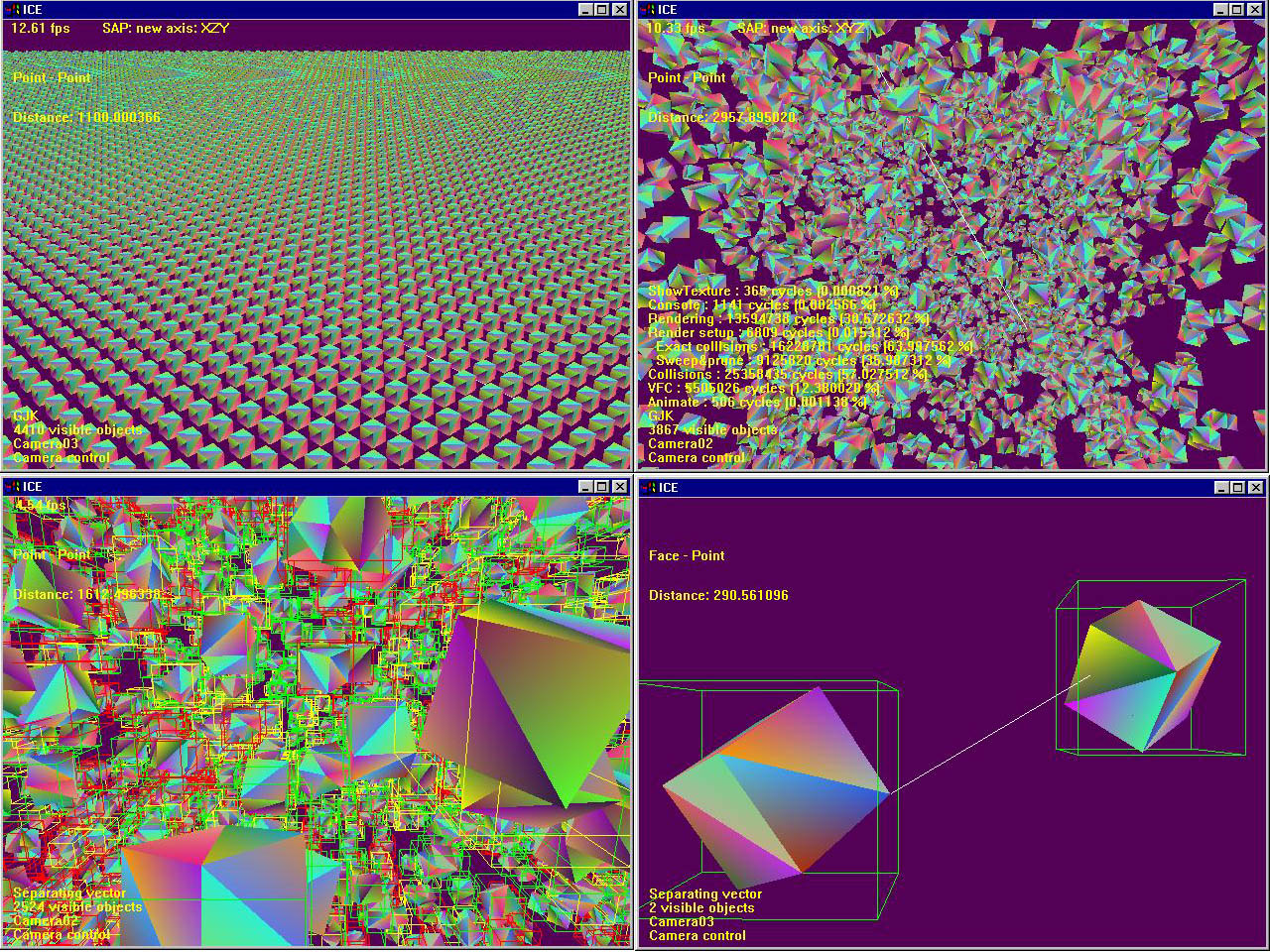
Original version
:
The old first demo is
still available here, but that one only includes the early OBB-trees.
Green bounding boxes
aren't colliding (not on the pic)
Red bounding boxes are
colliding, but the objects aren't.
Yellow bounding boxes are
colliding, and the objects as well.
Colliding faces are
marked as white.
{kind=link}